Raheb Saeed
"Ingénieur Mécatronique | Spécialiste de l'Industrie Intelligente"


Mon Histoire
À Propos de Moi
Ingénieur mécatronique spécialisé dans la robotique avancée et l'automatisation pilotée par l'IA. Mon expertise réside dans la conception et le déploiement de systèmes intelligents et connectés, avec une expérience pratique en robotique cloud, jumeaux numériques et IA conversationnelle.
Actuellement en Master Industrie Intelligente à l'Université Sidi Mohamed Ben Abdellah, je suis passionné par la construction de la prochaine génération de robots flexibles et autonomes qui résolvent les défis industriels du monde réel, du concept et de la simulation au déploiement physique.
Aperçu de Carrière
Diplômes et Certifications
Compétences Techniques
Projets Réalisés
Prix National
Études
Lycée Professionnel
Électricité et Installations Électriques Générales à l'Institut Chinois Yéménite à Sana'a, Yémen.
Technicien Spécialisé
Mécatronique à l'Institut Spécialisé dans les Métiers de l'Automobile (ISMA), Salé, Maroc.
Licence Professionnelle
Mécatronique et Systèmes Embarqués à la Faculté des Sciences Dhar El Mehraz, Université Sidi Mohamed Ben Abdellah, Fès, Maroc.
Master
Industrie Intelligente à la Faculté des Sciences Dhar El Mehraz, Université Sidi Mohamed Ben Abdellah, Fès.
Reconnu par l'industrie et les institutions de recherche

Club de Robotique FSDM
Développeur Robotique Principal & Responsable IT
2025
Redal
Technicien Spécialisé
2021
Univalor Maroc
Stagiaire en mise en œuvre de station météo
2022
Bazara'a
Technicien spécialisé en électricité et maintenance
2015Expertise Technique
Robotique Avancée & Ind 4.0
Robotique Cloud, Jumeaux Numériques, MES/MOM, Communication Industrielle (MQTT, OPC-UA) et Systèmes de Fabrication Flexibles.
Robotique & Automatisation
Robot Operating System (ROS 1 & 2), Simulation (Gazebo, CoppeliaSim), Systèmes de Contrôle, PLC et SCADA.
IA & Science des Données
Apprentissage Automatique, Apprentissage Profond, Vision par Ordinateur (OpenCV) et NLP pour l'IA Conversationnelle.
Programmation & Cloud
Python, C++, C#, Java et Plateformes Cloud (bases AWS/Azure) avec intégration de plateformes IoT.
Systèmes Embarqués
Programmation de microcontrôleurs (Arduino, PIC, ESP32) avec divers capteurs et actionneurs pour un développement de firmware robuste.
Mécanique & Électrique
Modélisation 3D (SolidWorks/CATIA), Conception de Circuits (Proteus), Conception de PCB et Prototypage Rapide (Impression 3D).
Vitrine
High-precision implementations spanning Robotics, AI, and Smart Industrial systems.

FSDM Conversational Bot
Un robot mobile autonome capable de navigation en temps réel et de conversation en langage naturel pour assister les visiteurs de la faculté.
- ›Utilise ROS pour la navigation (SLAM, planification de trajectoire).
- ›Implémente des modèles NLP pour le moteur de conversation.
- ›Architecture Cloud Robotics pour le traitement hors-site et la gestion à distance.

Jumeau Numérique d'Entrepôt Unity
Une simulation d'entrepôt haute fidélité construite avec Unity et Blender pour la surveillance en temps réel et la maintenance préventive.
- ›Modélisation d'un environnement d'entrepôt complexe avec Blender pour un rendu haute performance.
- ›Développement d'une interface interactive pour la navigation en temps réel et le suivi des robots.
- ›Implémentation du contrôle marche/arrêt et des alertes de maintenance prédictive.

Jumeau Numérique pour Cellule de Fabrication
Une cellule de fabrication robotisée reflétant le matériel physique pour la programmation hors ligne et l'optimisation des processus.
- ›Développé en simulation (Gazebo/CoppeliaSim).
- ›Intégration de flux de données MES pour simuler les changements de production en temps réel.
- ›Validation de la flexibilité de la planification de trajectoire du bras robotique.

Système de Fabrication Flexible (FMS)
Simulation complète d'un Système de Fabrication Flexible avec Anylogic PLE, démontrant le flux de matériaux autonome et l'optimisation de la production.
- ›Modélisation de production multi-étapes avec AGVs et cellules robotisées.
- ›Implémentation de simulation à événements discrets pour l'analyse du débit.
- ›Optimisation des tailles de tampons et de l'utilisation des machines.
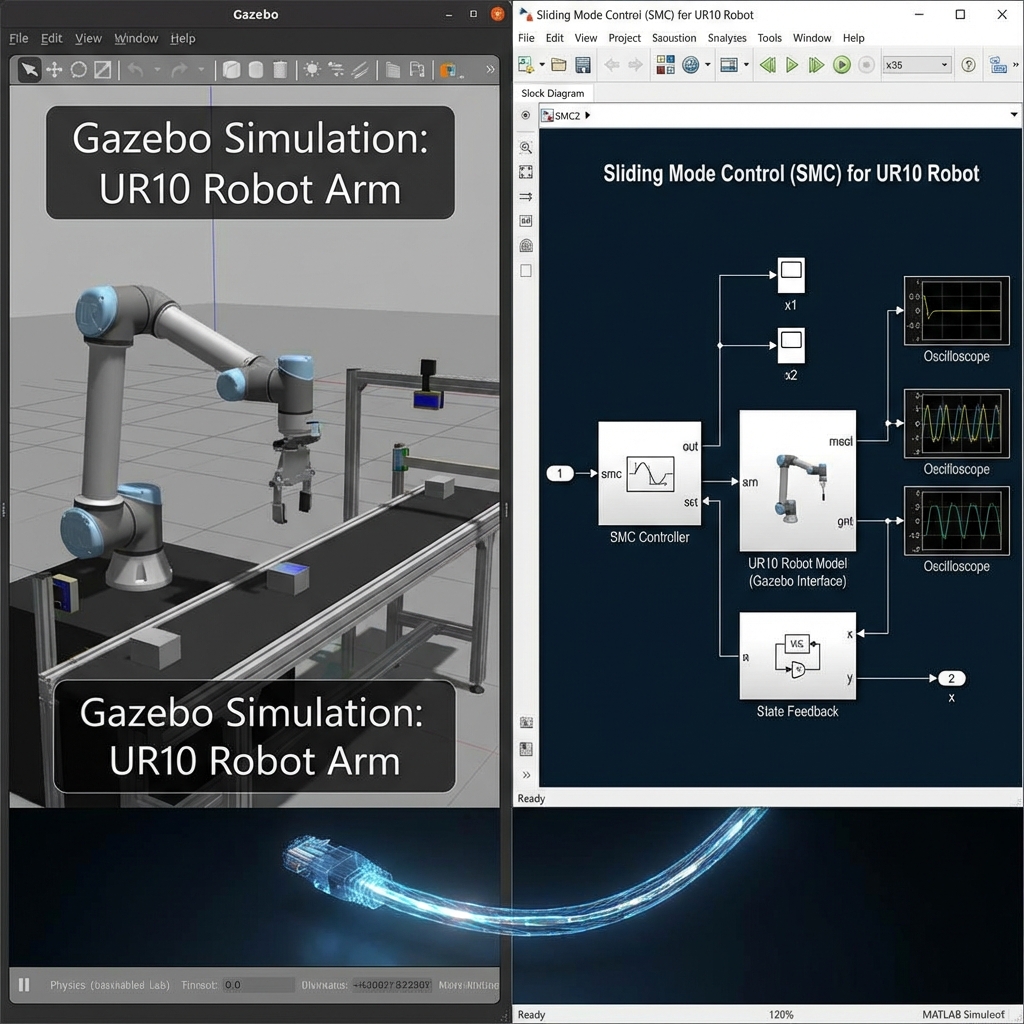
Intégration UR10 Gazebo-Simulink
Pont entre la simulation du robot UR10 dans Gazebo et MATLAB/Simulink pour l'implémentation de la Commande par Mode Glissant (SMC).
- ݃tablissement du pont ROS entre Gazebo et Simulink.
- ›Conception d'un contrôleur par mode glissant pour un suivi de trajectoire robuste.
- ›Activation du retour en temps réel de position et vitesse des articulations.

Robot Collaboratif Niryo Ned2
Programmation et intégration du robot collaboratif Niryo Ned2 à 6 axes pour des tâches de pick-and-place et d'automatisation éducative.
- ›Développement de scripts Python pour le contrôle de l'effecteur et la planification de trajectoire.
- ›Intégration avec ROS pour une coordination avancée des mouvements.
- ›Implémentation d'opérations pick-and-place guidées par vision.
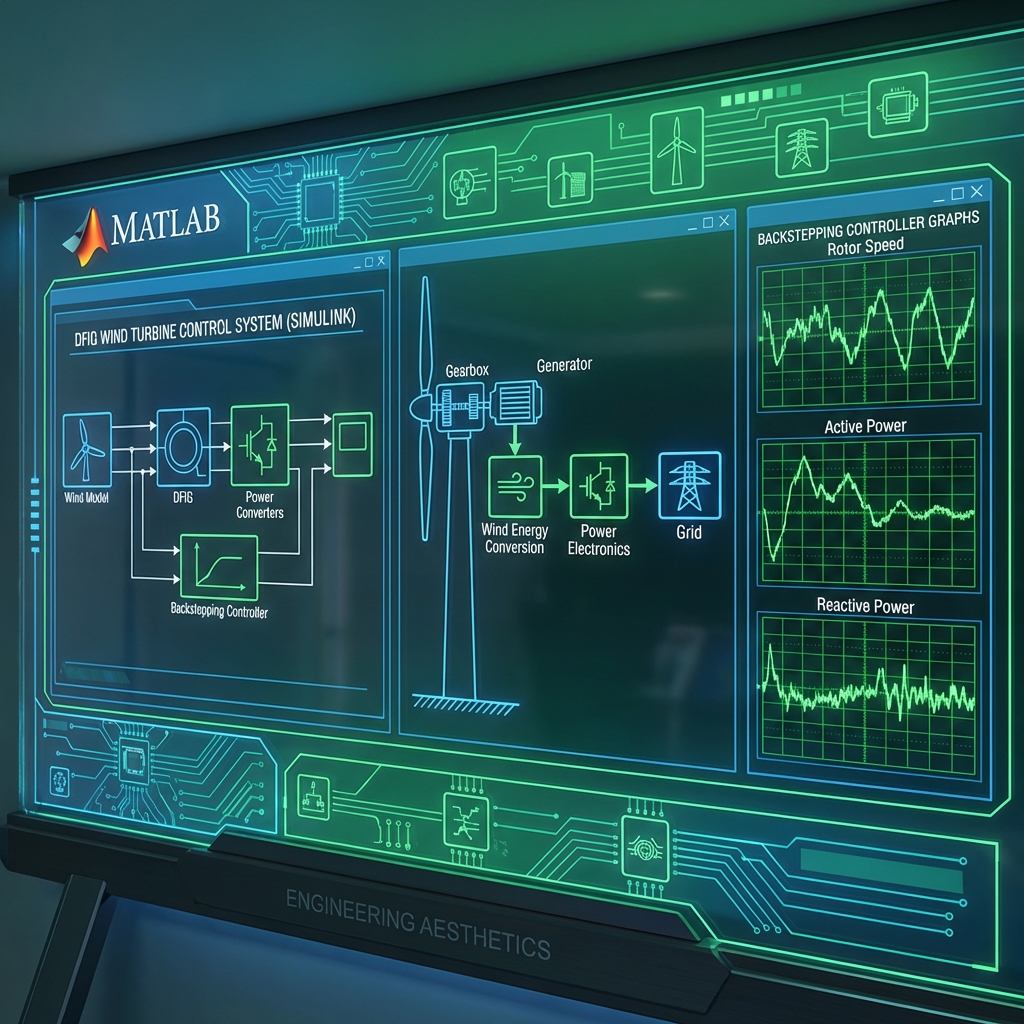
Commande Backstepping Éolienne (GADA/DFIG)
Implémentation d'une stratégie de commande Backstepping pour un système de conversion d'énergie éolienne basé sur une génératrice asynchrone à double alimentation.
- ›Développement d'un modèle DFIG complet sous MATLAB/Simulink.
- ›Implémentation d'un contrôleur Backstepping non-linéaire pour des performances robustes.
- ›Contrôle découplé des puissances active et réactive.
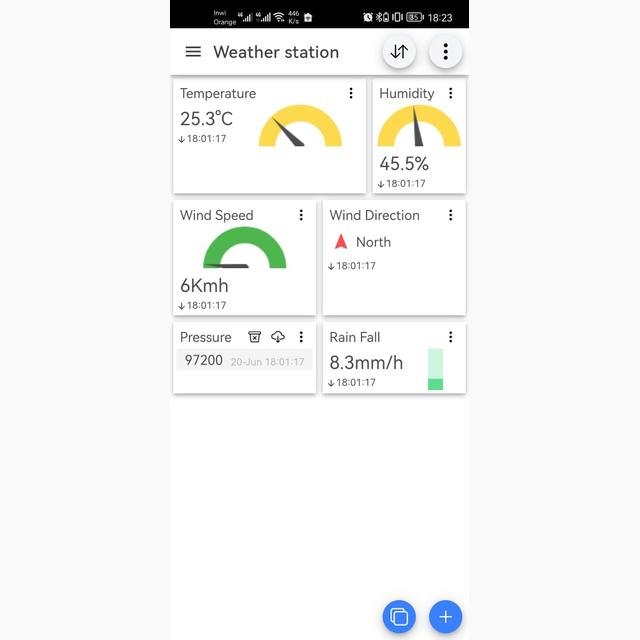
Système de surveillance météorologique IoT
Une station météo de bout en bout pour la transmission de données à longue portée et une surveillance en temps réel.
- ›Utilise le protocole LoRaWAN pour une communication robuste à longue distance.
- ›S'intègre à une passerelle RAK7243 pour recevoir et traiter les données.
- ›Publie les données sur un broker MQTT pour un flux de données efficace.
MedXAccess - Pharmacie Intelligente
Un concept de pharmacie robotisée autonome 24h/24 et 7j/7 développé pour le concours INJAZ Al-Maghrib.
- ›Intégration d'une application mobile pour les commandes de médicaments.
- ›Système de distribution et de suivi des médicaments basé sur des codes QR.
- ›Validation et traitement automatisés des ordonnances via l'IA.
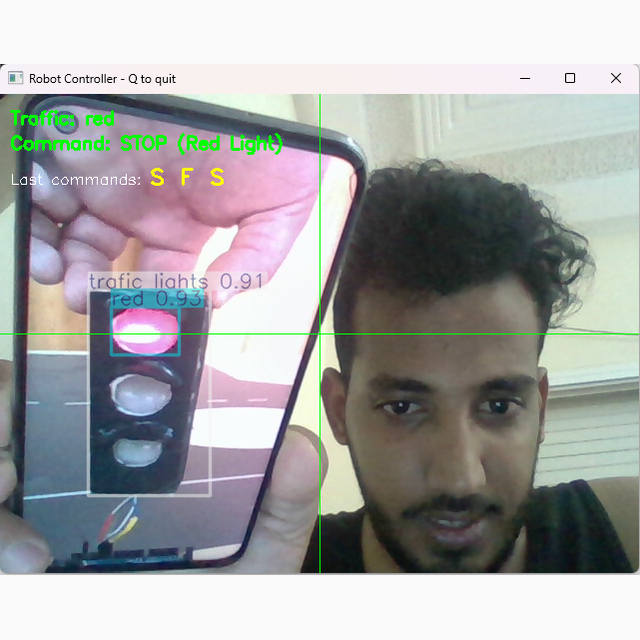
Détecteur de feux en temps réel
Un modèle de vision par ordinateur conçu pour identifier les feux de signalisation et leur état.
- ›Entraîné sur un jeu de données personnalisé géré via Roboflow.
- ›Implémentation d'une architecture YOLO8 pour une détection rapide.
- ›Identifie et classifie avec précision l'état du feu.
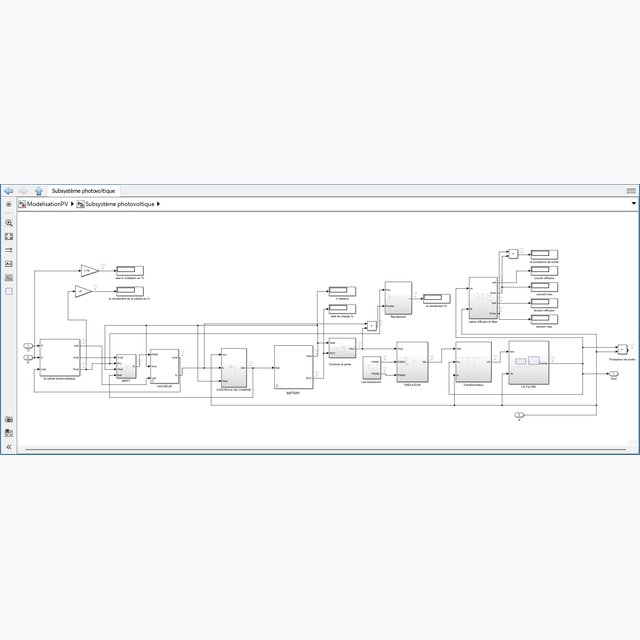
Système photovoltaïque
Un jumeau numérique détaillé d'une chaîne de conversion d'énergie solaire pour analyser les performances.
- ›Modélisé dans MATLAB & Simulink pour une simulation complète.
- ›Inclus des contrôleurs MPPT et des onduleurs.
- ›Optimisation de la récolte d'énergie sous diverses conditions.
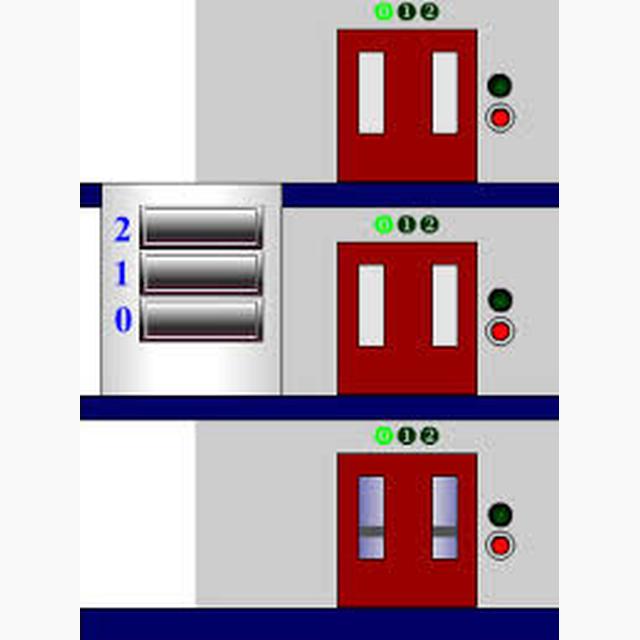
Contrôle logique d'ascenseur
Un projet d'automatisation industrielle conçu pour contrôler un ascenseur à plusieurs étages.
- ›Programmé avec des schémas GRAFCET et LADDER.
- ›Simulation complète utilisant EasyVeep pour les tests IHM.
- ›Mise en œuvre de verrous de sécurité pour la gestion des portes.
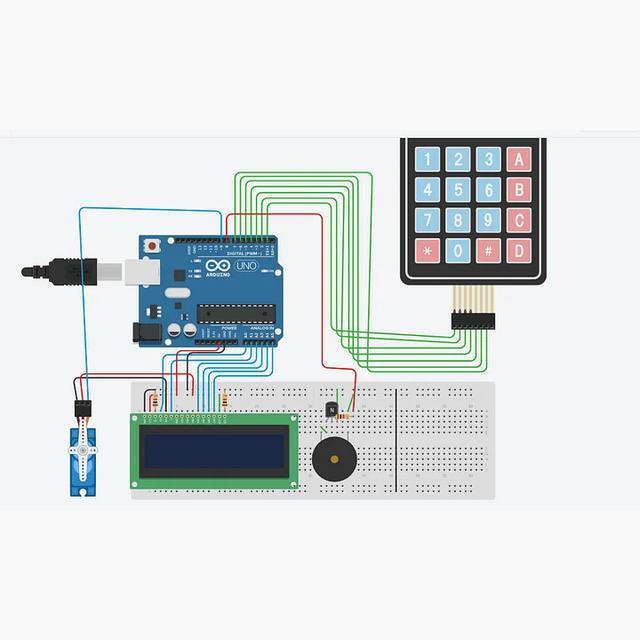
Système de Sécurité Arduino
Système de verrouillage de porte de sécurité à clavier avec authentification et alarmes.
- ›Firmware C++ pour microcontrôleur ATMega328P.
- ›Stockage EEPROM pour les codes de sécurité persistants.
- ›Interface avec écran LCD et clavier matriciel.
Consulter mon CV complet
Pour une vue détaillée de mon expérience, de ma formation et de mes compétences techniques, veuillez consulter mon CV complet.