رهيب سعيد
"مهندس ميكاترونيك | متخصص في الصناعة الذكية"


قصتي
نبذة عني
مهندس ميكاترونيك متخصص في الروبوتات المتقدمة والأتمتة القائمة على الذكاء الاصطناعي. تكمن خبرتي في تصميم ونشر الأنظمة الذكية والمتصلة، مع خبرة عملية في روبوتات السحاب، التوائم الرقمية، والذكاء الاصطناعي التوليدي.
حالياً أتابع درجة الماجستير في الصناعة الذكية في جامعة سيدي محمد بن عبد الله. أنا شغوف ببناء الجيل القادم من الروبوتات المرنة والمستقلة التي تحل تحديات صناعية واقعية، من المفهوم والمحاكاة إلى النشر الفعلي.
نظرة عامة على المسار
الشهادات والاعتمادات
المهارات التقنية
المشاريع المنجزة
الجوائز الوطنية
التعليم
الثانوية المهنية
الكهرباء والتركيبات الكهربائية العامة في المعهد الصيني اليمني في صنعاء، اليمن.
تقني متخصص
الميكاترونيك في المعهد المتخصص في مهن السيارات (ISMA)، سلا، المغرب.
الإجازة المهنية
الميكاترونيك والأنظمة المدمجة في كلية العلوم ظهر المهراز، جامعة سيدي محمد بن عبد الله، فاس، المغرب.
درجة الماجستير
الصناعة الذكية في كلية العلوم ظهر المهراز، جامعة سيدي محمد بن عبد الله، فاس.
خبرة معتمدة من قبل الصناعة والمؤسسات البحثية

نادي الروبوتات FSDM
مطور روبوتات رئيسي ومدير تكنولوجيا المعلومات
2025
ريضال
تقني متخصص
2021
يونيفالور المغرب
متدرب في تنفيذ محطة الأرصاد الجوية
2022
بازرعة
تقني متخصص في الكهرباء والصيانة
2015الخبرة التقنية
الروبوتات المتقدمة و Ind 4.0
روبوتات السحاب، التوائم الرقمية، MES/MOM، الاتصالات الصناعية (MQTT, OPC-UA)، وأنظمة التصنيع المرنة.
الروبوتات والأتمتة
نظام تشغيل الروبوت (ROS 1 & 2)، المحاكاة (Gazebo, CoppeliaSim)، أنظمة التحكم، PLC، و SCADA.
الذكاء الاصطناعي وعلوم البيانات
تعلم الآلة، التعلم العميق، الرؤية الحاسوبية (OpenCV)، والمعالجة الطبيعية للغات (NLP).
البرمجة والسحاب
Python, C++, C#, Java، والمنصات السحابية (AWS/Azure) مع تكامل منصات إنترنت الأشياء.
الأنظمة المدمجة
برمجة المتحكمات الدقيقة (Arduino, PIC, ESP32) مع مختلف الحساسات والمشغلات لتطوير برمجيات ثابتة قوية.
الميكانيكا والكهرباء
النمذجة ثلاثية الأبعاد (SolidWorks/CATIA)، تصميم الدوائر (Proteus)، تصميم PCB، والبروتوتايب السريع (3D Printing).
معرض الأعمال
High-precision implementations spanning Robotics, AI, and Smart Industrial systems.

روبوت FSDM للمحادثة
روبوت متنقل مستقل قادر على الملاحة في الوقت الفعلي والمحادثة باللغة الطبيعية لمساعدة زوار الكلية.
- ›يستخدم ROS للملاحة (SLAM، تخطيط المسار).
- ›ينفذ نماذج NLP لمحرك المحادثة.
- ›تصميم روبوتات السحاب للمعالجة خارج الموقع والإدارة عن بعد.

التوأم الرقمي لمستودع بـ Unity
محاكاة مستودع عالية الدقة تم بناؤها باستخدام Unity و Blender للمراقبة في الوقت الفعلي والصيانة التنبؤية.
- ›نمذجة بيئة مستودع معقدة باستخدام Blender لتقديم أداء عالٍ.
- ›تطوير واجهة مستخدم تفاعلية للملاحة في الوقت الفعلي ومراقبة حالة الروبوتات.
- ›تنفيذ التحكم في البدء/الإيقاف وتنبيهات الصيانة التنبؤية للآلات.

التوأم الرقمي لخلية التصنيع
خلية تصنيع روبوتية تحاكي الأجهزة الفيزيائية للبرمجة خارج الموقع وتحسين العمليات.
- ›تم تطويره في المحاكاة (Gazebo/CoppeliaSim).
- ›تكامل بيانات MES لمحاكاة تغييرات الإنتاج في الوقت الفعلي.
- ›التحقق من مرونة تخطيط مسار الذراع الروبوتية في البيئات الديناميكية.

نظام التصنيع المرن (FMS)
محاكاة كاملة لنظام التصنيع المرن باستخدام Anylogic PLE، توضح التدفق المادي المستقل وتحسين الإنتاج.
- ›نمذجة إنتاج متعدد المراحل مع AGVs وخلايا روبوتية.
- ›تنفيذ محاكاة الأحداث المنفصلة لتحليل الإنتاجية.
- ›تحسين أحجام المخازن المؤقتة واستخدام الآلات.
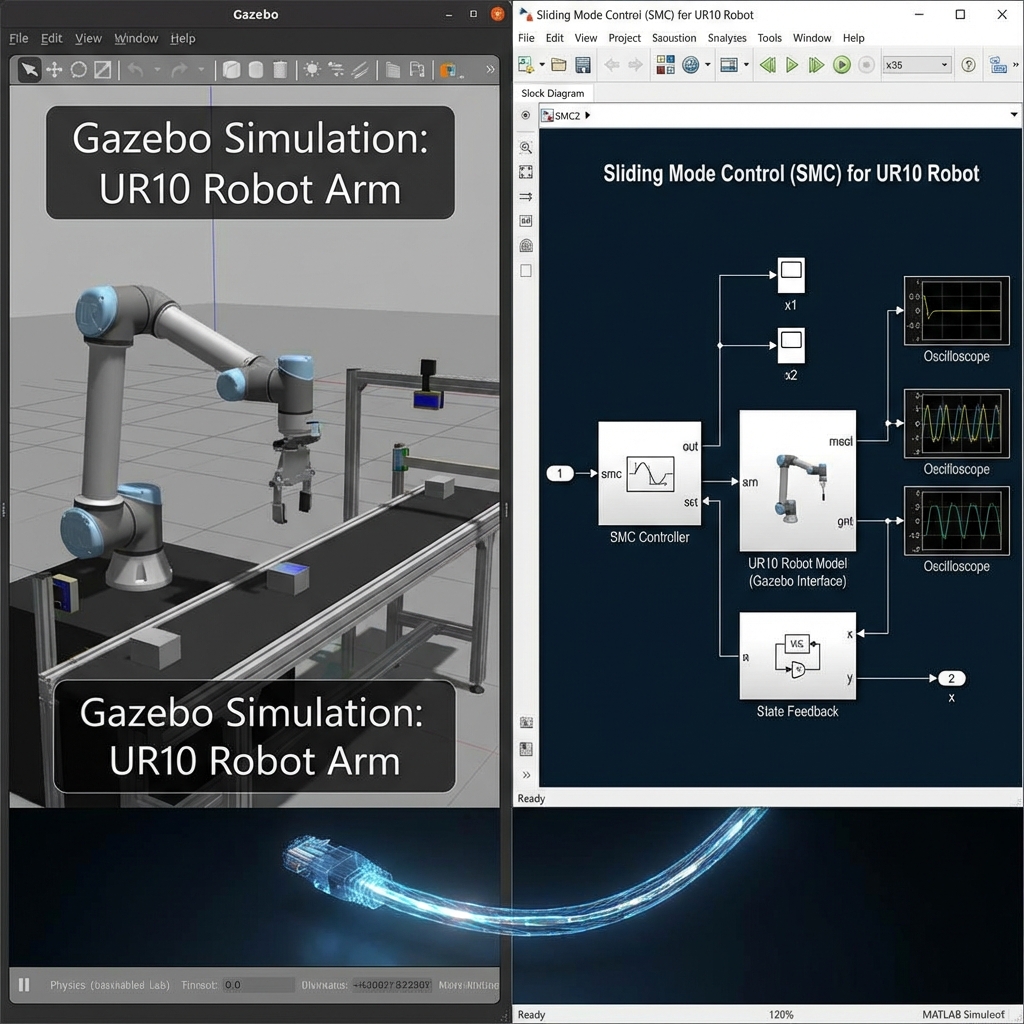
تكامل UR10 Gazebo-Simulink
ربط محاكاة روبوت UR10 في Gazebo مع MATLAB/Simulink لتنفيذ التحكم بالوضع المنزلق (SMC) المتقدم.
- ›إنشاء جسر ROS بين Gazebo و Simulink.
- ›تصميم متحكم الوضع المنزلق لتتبع المسار القوي.
- ›تمكين التغذية الراجعة الفورية لموضع وسرعة المفاصل.

روبوت Niryo Ned2 التعاوني
برمجة وتكامل روبوت Niryo Ned2 ذو 6 محاور للمهام الأتمتة التعليمية والالتقاط والوضع.
- ›تطوير سكربتات Python للتحكم في المؤثر النهائي وتخطيط المسار.
- ›التكامل مع ROS لتنسيق الحركة المتقدمة.
- ›تنفيذ عمليات الالتقاط والوضع الموجهة بالرؤية.
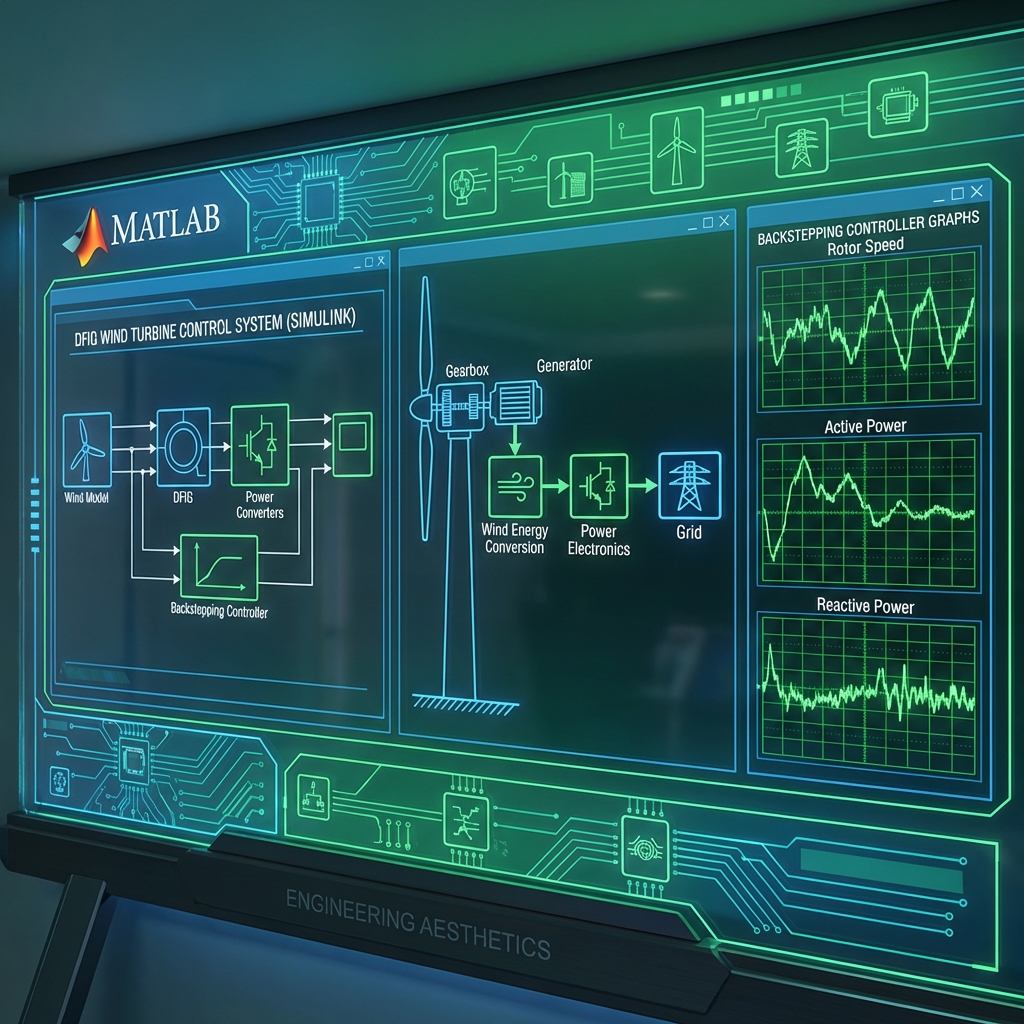
التحكم Backstepping لتوربينات الرياح (DFIG)
تنفيذ استراتيجية التحكم Backstepping لنظام تحويل طاقة الرياح القائم على مولد الحث مزدوج التغذية (GADA/DFIG).
- ›تطوير نموذج DFIG كامل في MATLAB/Simulink.
- ›تنفيذ متحكم Backstepping غير خطي للأداء القوي.
- ›تحقيق التحكم المنفصل في الطاقة الفعالة والتفاعلية.
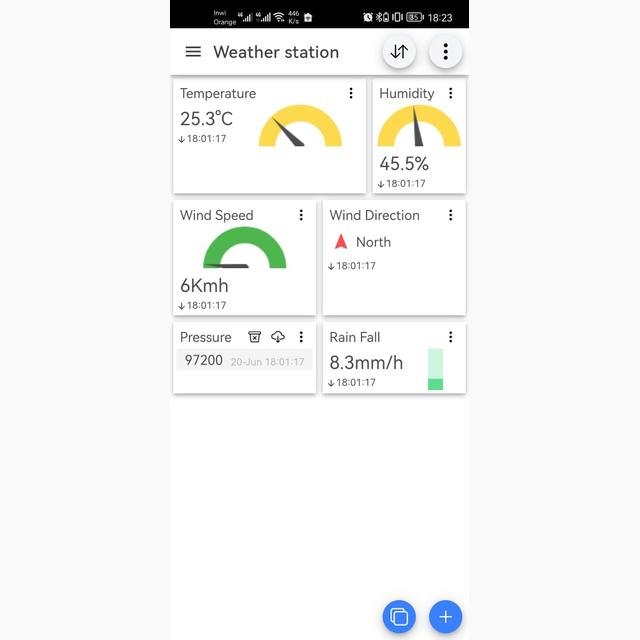
نظام مراقبة الطقس عبر إنترنت الأشياء
محطة طقس متكاملة لنقل البيانات لمسافات طويلة واستهلاك منخفض للطاقة والمراقبة في الوقت الفعلي.
- ›يستخدم بروتوكول LoRaWAN للاتصال القوي لمسافات طويلة.
- ›يتكامل مع بوابة RAK7243 لاستقبال ومعالجة بيانات الحساسات.
- ›ينشر البيانات إلى وسيط MQTT لخط أنابيب بيانات فعال وفي الوقت الفعلي.
MedXAccess - صيدلية ذكية
مفهوم صيدلية روبوتية ذكية تعمل على مدار الساعة طوال أيام الأسبوع تم تطويره لمسابقة إنجاز المغرب.
- ›تكامل تطبيق جوال لطلبات الأدوية السهلة للعملاء.
- ›نظام صرف وتتبع الأدوية القائم على رمز QR.
- ›التحقق والمعالجة الآلية للوصفات الطبية المدعومة بالذكاء الاصطناعي.
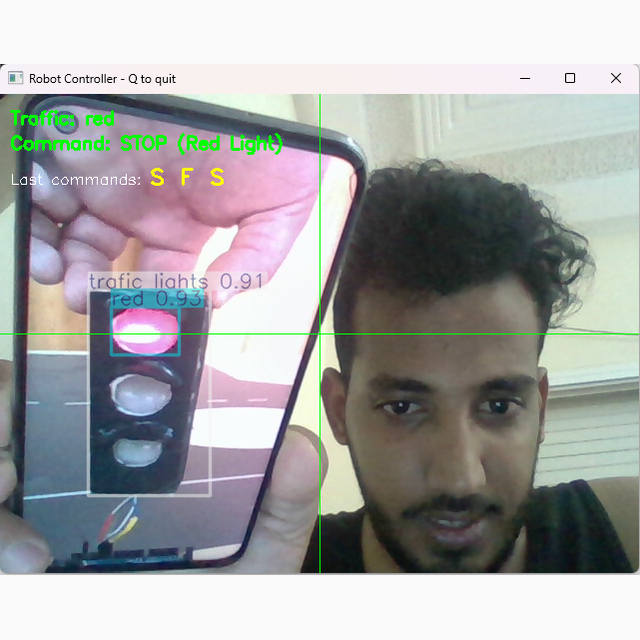
كاشف إشارات المرور في الوقت الفعلي
نموذج رؤية حاسوبية مصمم لتحديد إشارات المرور وحالتها من بث فيديو مباشر.
- ›تدرب على مجموعة بيانات مخصصة تتم إدارتها باستخدام Roboflow.
- ›نفذ بنية YOLO8 للكشف عالي السرعة.
- ›يرسم صناديق محيطة ويصنف حالة الضوء بدقة.
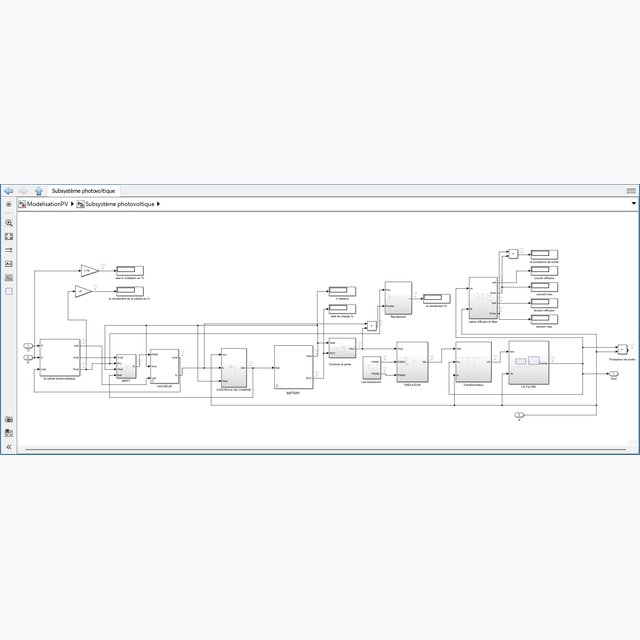
نظام الطاقة الكهروضوئية
توأم رقمي مفصل لسلسلة تحويل الطاقة الشمسية لتحليل الأداء والكفاءة.
- ›تمت النمذجة في MATLAB & Simulink لمحاكاة مصفوفة كهروضوئية كاملة.
- ›تضمن متحكمات MPPT وعاكسات الطاقة.
- ›تحسين حصاد الطاقة في ظروف متنوعة.
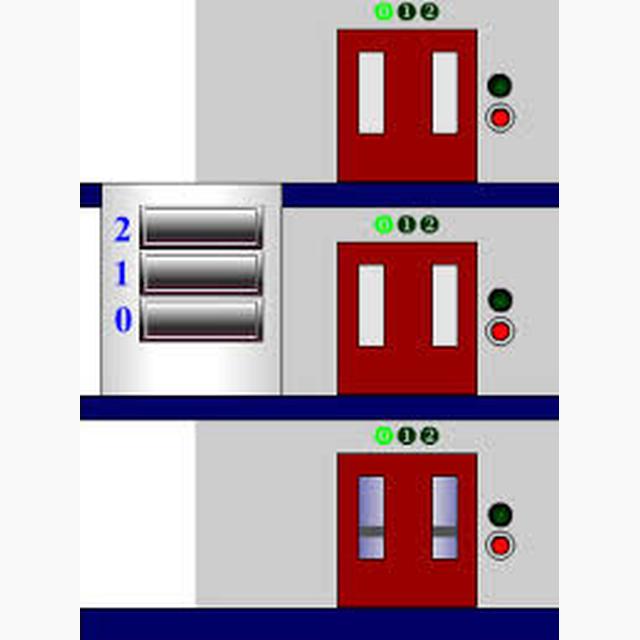
التحكم المنطقي في المصعد
مشروع أتمتة صناعية مصمم للتحكم في مصعد متعدد الطوابق مع أقفال أمان.
- ›مبرمج باستخدام مخططات GRAFCET و LADDER.
- ›محاكاة النظام باستخدام EasyVeep لاختبار المنطق و HMI.
- ›تنفيذ أقفال الأمان لإدارة الأبواب.
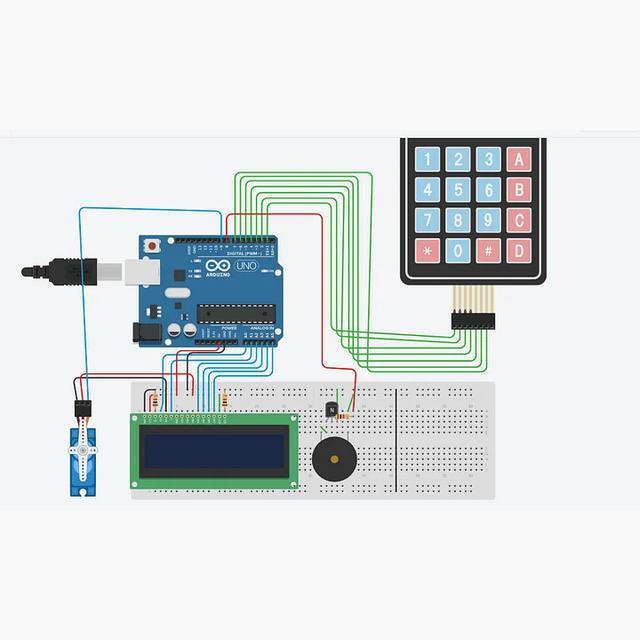
نظام بروتوكول الأمان أردوينو
نظام قفل باب أمان يعتمد على لوحة مفاتيح مع مصادقة ومشغلات إنذار.
- ›برمجة C++ للمتحكم الدقيق ATMega328P.
- ›تخزين EEPROM لأكواد الأمان الدائمة.
- ›واجهة مع شاشة LCD ولوحة مفاتيح مصفوفة للتفاعل.
عرض سيرتي الذاتية كاملة
للحصول على نظرة مفصلة على خبرتي وتعليمي ومهاراتي التقنية، يرجى عرض سيرتي الذاتية الكاملة.