Raheb Saeed
"Mechatronics Engineer | Smart Industry Specialist"


My Story
About Me
Powered mechatronics engineer specializing in Advanced Robotics and AI-driven Automation. My expertise lies in designing and deploying intelligent, connected systems, with hands-on experience in Cloud Robotics, Digital Twins, and conversational AI.
Currently pursuing a Master's degree in Smart Industry at Sidi Mohamed Ben Abdellah University, I am passionate about building the next generation of flexible, autonomous robots that solve real-world industrial challenges, from concept and simulation to physical deployment.
Career Overview
Degrees & Certifications
Technical Skills
Projects Completed
National Award
Education
Vocational High School
Electricity and General Electrical Installations at the Chinese Yemeni Institute in Sana'a, Yemen.
Technician Specialist
Mechatronics at the Institute Specialized in Automotive Professions (ISMA), Salé, Morocco.
Professional License
Mechatronics and Embedded Systems at Faculty of Sciences Dhar El Mehraz, Sidi Mohamed Ben Abdellah University, Fes, Morocco.
Master's Degree
Smart Industry at Faculty of Sciences Dhar El Mehraz, Sidi Mohamed Ben Abdellah University, Fes.
Trusted by industry and research institutions

FSDM Robotics Club
Lead Robotics Developer & IT Manager
2025
Redal
Technical Specialist
2021
Univalor Maroc
Weather Station Implementation Intern
2022
Bazara'a
Specialized Technician in Electricity and Maintenance
2015Technical Expertise
Advanced Robotics & Ind 4.0
Cloud Robotics, Digital Twins, MES/MOM, Industrial Communication (MQTT, OPC-UA), and Flexible Manufacturing Systems.
Robotics & Automation
Robot Operating System (ROS 1 & 2), Simulation (Gazebo, CoppeliaSim), Control Systems, PLC, and SCADA.
AI & Data Science
Machine Learning, Deep Learning, Computer Vision (OpenCV), and NLP for Conversational AI.
Programming & Cloud
Python, C++, C#, Java, and Cloud Platforms (AWS/Azure basics) with IoT Platform integration.
Embedded Systems
Microcontroller programming (Arduino, PIC, ESP32) with various sensors and actuators for robust firmware development.
Mechanical & Electrical
3D Modeling (SolidWorks/CATIA), Circuit Design (Proteus), PCB Design, and Rapid Prototyping (3D Printing).
Showcase
High-precision implementations spanning Robotics, AI, and Smart Industrial systems.

FSDM Conversational Bot
An autonomous mobile robot capable of real-time navigation and natural language conversation to assist faculty visitors.
- ›Utilizes ROS for navigation (SLAM, path planning).
- ›Implements NLP models for the conversational engine.
- ›Architected Cloud Robotics for off-board processing and remote management.

Unity Warehouse Digital Twin
A high-fidelity warehouse simulation built with Unity and Blender for real-time monitoring and predictive maintenance.
- ›Modeled complex warehouse environment using Blender for high-performance rendering.
- ›Developed interactive UI for real-time navigation and robot status monitoring.
- ›Implemented start/stop control and predictive maintenance alerts for machines.

Digital Twin for Fabrication Cell
A robotic manufacturing cell mirroring physical hardware for offline programming and process optimization.
- ›Developed in simulation (Gazebo/CoppeliaSim).
- ›Integrated MES data feeds to simulate real-time production changes.
- ›Validated flexibility of robotic arm's path planning in dynamic environments.

Flexible Manufacturing System (FMS)
A complete simulation of a Flexible Manufacturing System using Anylogic PLE, demonstrating autonomous material flow and production optimization.
- ›Modeled multi-stage production with AGVs and robotic cells.
- ›Implemented discrete-event simulation for throughput analysis.
- ›Optimized buffer sizes and machine utilization.
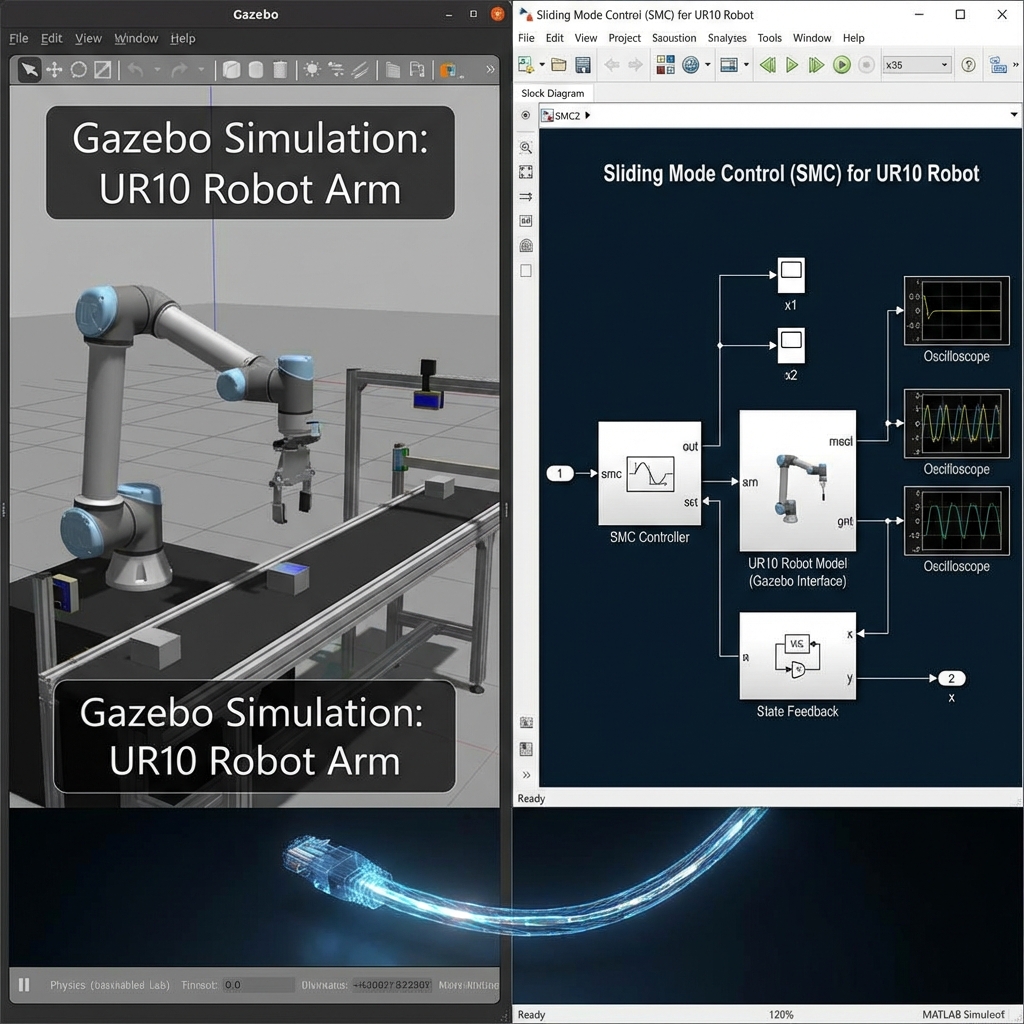
UR10 Gazebo-Simulink Integration
Bridging the UR10 robot simulation in Gazebo with MATLAB/Simulink for advanced Sliding Mode Control (SMC) implementation.
- ›Established ROS bridge between Gazebo and Simulink.
- ›Designed Sliding Mode Controller for robust trajectory tracking.
- ›Enabled real-time joint position and velocity feedback.

Niryo Ned2 Collaborative Robot
Programming and integration of the Niryo Ned2 6-axis collaborative robot for pick-and-place and educational automation tasks.
- ›Developed Python scripts for end-effector control and trajectory planning.
- ›Integrated with ROS for advanced motion coordination.
- ›Implemented vision-guided pick-and-place operations.
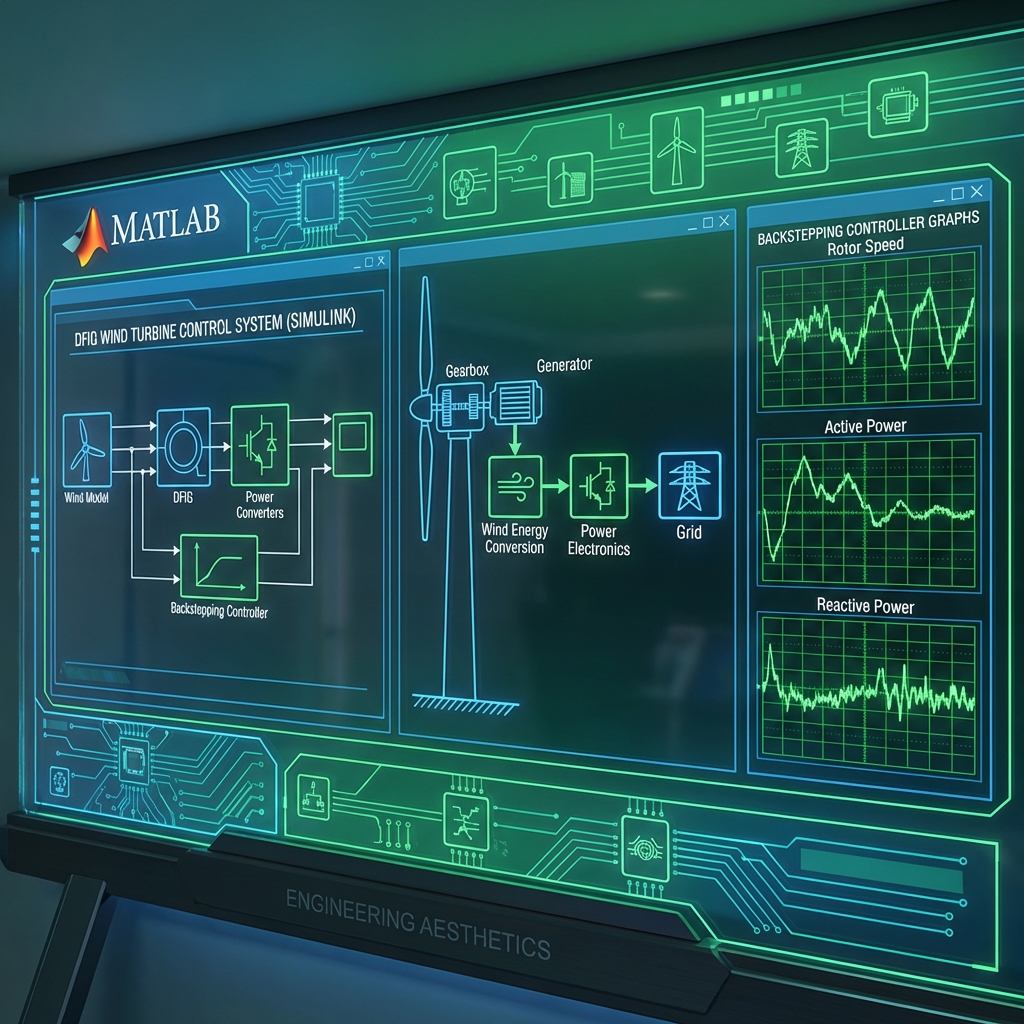
Wind Turbine Backstepping Control (DFIG)
Implementation of a Backstepping control strategy for a Doubly-Fed Induction Generator (GADA/DFIG) based wind energy conversion system.
- ›Developed complete DFIG model in MATLAB/Simulink.
- ›Implemented nonlinear Backstepping controller for robust performance.
- ›Achieved decoupled active and reactive power control.
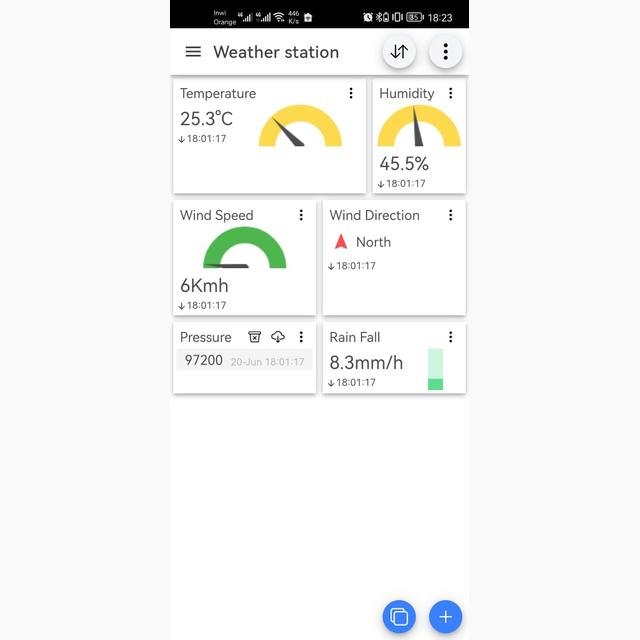
IoT Weather Monitoring System
An end-to-end weather station for long-range, low-power data transmission and real-time monitoring.
- ›Utilizes LoRaWAN protocol for robust, long-distance communication.
- ›Integrates with a RAK7243 gateway to receive and process sensor data.
- ›Publishes data to an MQTT broker for an efficient, real-time data pipeline.
MedXAccess - Smart Pharmacy
A 24/7 autonomous robotic pharmacy concept developed for the INJAZ Al-Maghrib competition.
- ›Mobile app integration for easy customer medicine orders.
- ›QR code based medicine dispensing and tracking system.
- ›AI-powered automated prescription validation and processing.
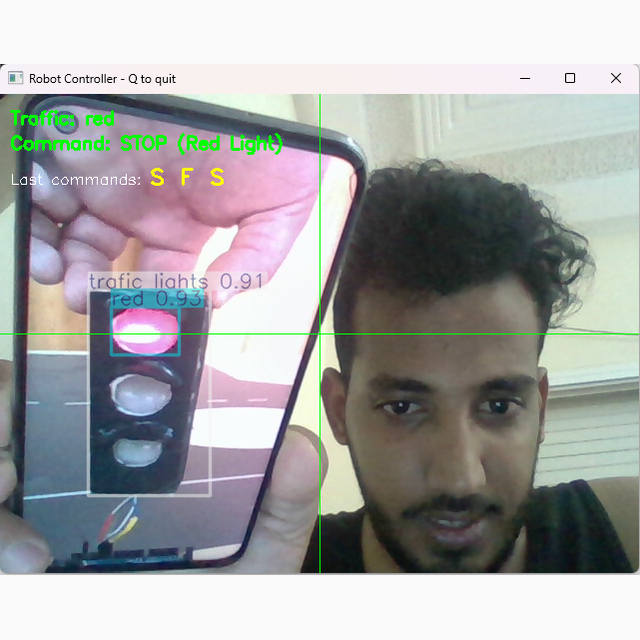
Real-time Traffic Light Detector
A computer vision model built to identify traffic lights and their state from a real-time video stream.
- ›Trained on a custom dataset managed using Roboflow.
- ›Implemented a YOLO8 architecture for high-speed detection.
- ›Draws bounding boxes and classification for light states.
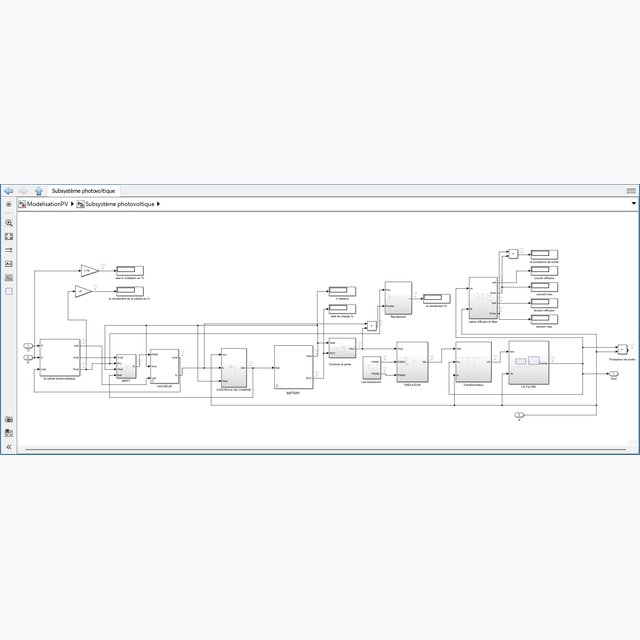
Photovoltaic System
A digital twin of a solar power conversion chain to analyze performance and efficiency.
- ›Modeled in MATLAB & Simulink for complete PV array simulation.
- ›Includes MPPT controllers and power inverters.
- ›Energy harvest optimization under various conditions.
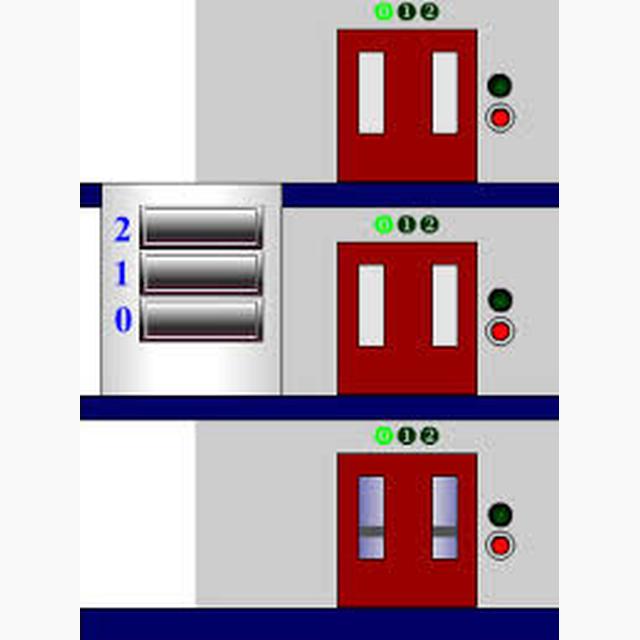
Elevator Logic Control
An industrial automation project designed to control a multi-floor elevator with safety interlocks.
- ›Programmed using GRAFCET and LADDER diagrams.
- ›Simulated with EasyVeep for logic testing and HMI.
- ›Safety interlock implementation for door management.
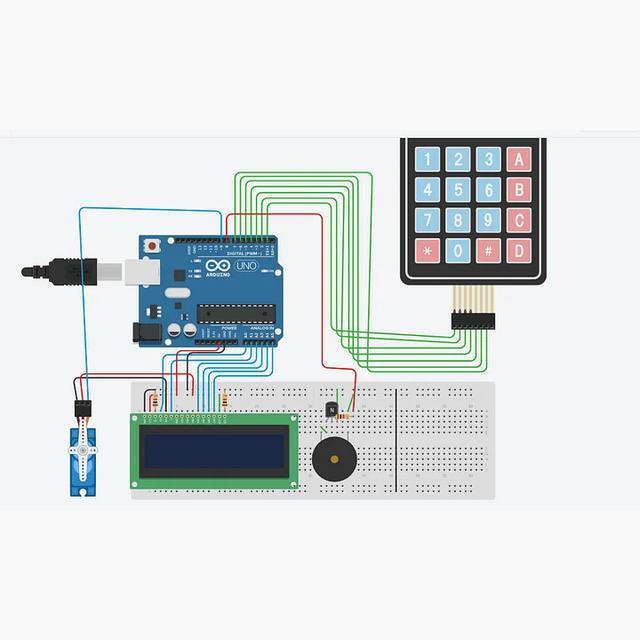
Arduino Security System
A keypad-based security door lock system with authentication and alarm triggers.
- ›C++ firmware for ATMega328P microcontroller.
- ›EEPROM storage for persistent security codes.
- ›Interface with LCD and matrix keypad for user interaction.
View My Full Resume
For a detailed overview of my experience, education, and technical skills, please view my complete resume.